《建筑变形测量规范》JGJ 8-2016
4 变形观测方法 / 4.6 卫星导航定位测量
4.6.1 卫星导航定位测量方法可用于二等、三等和四等位移观测。对二等观测,应采用静态测量模式;对三等、四等观测,可采用静态测量模式或动态测量模式。对日照、风振等变形测量,应采用动态测量模式。
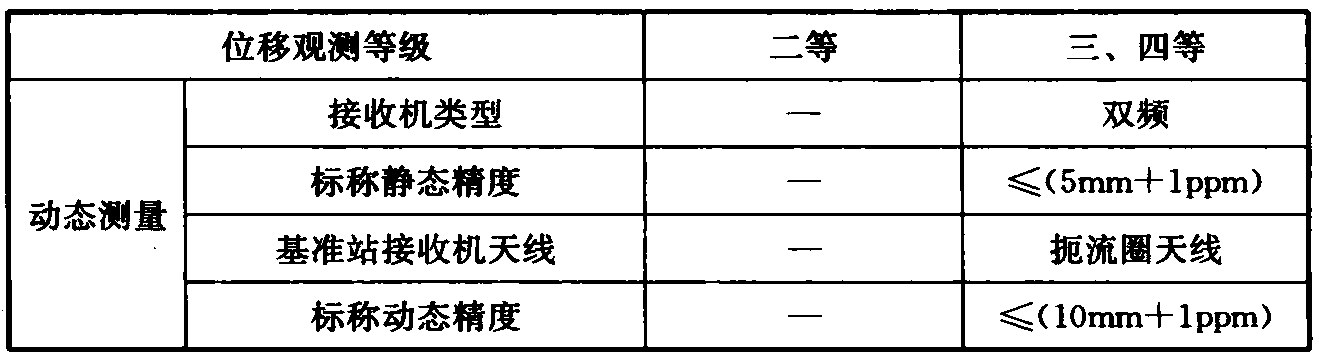
4.6.2 卫星导航定位测量设备的选用应符合表4.6.2的规定。

4.6.3 卫星导航定位测量接收设备的检定、检验应符合现行行业标准《卫星定位城市测量技术规范》CJJ/T73的规定,并应符合下列要求:
1 新购置的接收设备应进行全面检验后方可使用,检验内容应包括一般检验、常规检验、通电检验和实测检验。
2 每期变形测量作业前,应对所用接收设备进行实测检验。
3 当接收机或天线受到强烈撞击后,或更新接收机部件及更新天线与接收机的匹配关系后,应按新购置设备做全面检验。
4.6.4 采用卫星导航定位测量进行变形测量作业,其点位选择应符合下列规定:
1 视场内障碍物的高度角不宜超过15°。
2 离电视台、电台、微波站等大功率无线电发射源的距离不应小于200m,离高压输电线和微波无线电信号传输通道的距离不应小于50m,附近不应有强烈反射卫星信号的大面积水域、大型建筑以及热源等。
3 通视条件好,应便于采用全站仪等手段进行后续测量作业。
4.6.5 卫星导航定位测量静态测量作业应符合下列规定:
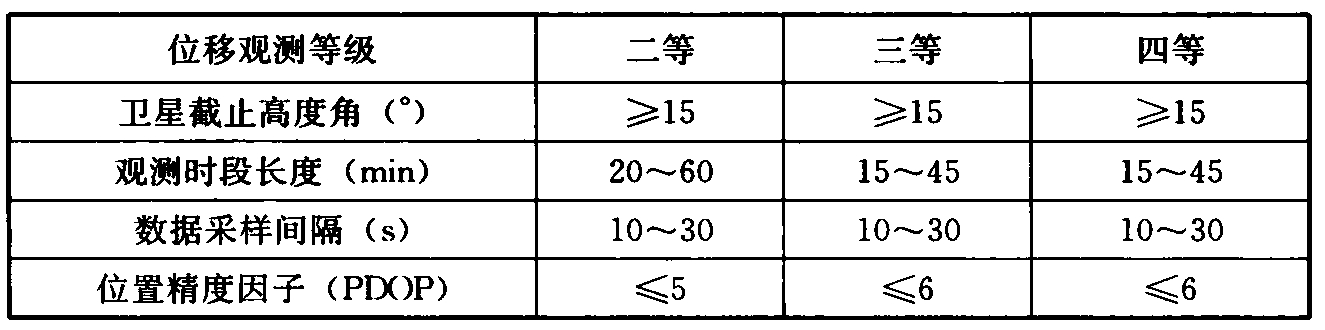
1 静态测量作业的基本技术要求应符合表4.6.5的规定。

3 作业中应按规定的时间计划进行观测。
4 经检查接收机电源电缆和天线等各项连接无误后,方可开机。
5 开机后经检验有关指示灯与仪表显示正常后,方可进行自测试及输入测站名、时段等控制信息。
6 接收机启动前与作业过程中,应填写测量手簿中的记录项目。
7 观测开始、结束时,应分别量测1次天线高,两次较差不应大于3mm,并应取其算术平均值作为天线高。
8 观测期间,应防止接收设备振动,并应防止人员和其他物体碰动天线或阻挡信号。
9 观测期间,不得在天线附近使用电台、对讲机和手机等无线电通信设备。
10 作业时,接收机应避免阳光直接照晒。雷雨天气时,应关机停测,并应卸下天线以防雷击。
11 作业过程中,不得进行下列操作:
1)接收机关闭又重新启动;
2)进行自测试;
3)改变卫星截止高度角;
4)改变数据采样间隔;
5)改变天线位置;
6)按动关闭文件和删除文件功能键。
12 对二等位移测量,宜采用高精度解算软件和精密星历进行数据处理;对三等或四等位移测量,可采用商用软件和预报星历进行数据处理。观测数据的处理和质量检查应符合现行行业标准《卫星定位城市测量技术规范》CJJ/T73的规定。同一时段观测值的数据采用率宜大于85%。
4.6.6 卫星导航定位测量动态测量作业应符合下列规定:
1 动态变形测量应建立由参考点站、监测点站、通信网络和数据处理分析系统组成的卫星导航定位测量动态变形监测系统。
2 动态变形监测系统应至少设置1个参考点站,必要时可增加1个参考点站。
3 参考点站应选在变形区域影响范围之外,距变形监测点的距离不应超过3km。
4 参考点站宜直接设置在位移基准点上。当位移基准点不能作为参考点站时,应设置位移工作基点,并将其作为动态变形监测系统的参考点站。
5 对高频次或变化敏感的监测点,应一个天线配置一台接收机,接收机宜具备1Hz以上的数据输出能力;对变化缓慢的变形监测点,可多个天线配置一台接收机。
6 参考点站和监测点站应与数据处理分析系统通过通信网络进行连通,并应保证数据实时传输。
7 数据处理分析系统软件应具有下列基本功能:
1)具备自动数据后处理和1Hz及以_上速率的实时动态数据处理能力,能提供监测点的三维坐标;
2)具备监测点变形量限差检核和报警能力,能进行监测点最大变形量、连续同向变形趋势允许量设置报警;
3)具备数据存储、管理和分析的能力;
4)具备全过程全自动管理能力;
5)具备输出RINEX格式的原始数据和NMEA格式的结果数据的能力;
6)具备信号去噪、单历元变形量解算能力;
7)具备实时在线数据分析和图形化报表能力;
8)具备对参考点站、监测点站进行监控和参数调整的功能。